- Получаване на връзка
- X
- Имейл
- Други приложения
Робот-дизайнът от настоящата статия беше първия ни опит да построим робот за състезанието ''Роботика за България'' 2020, но след като видяхме, че откъм функционалност никак не пасва на зададените задачи и мисии, които нашата машинка трябва да изпълни, го развалихме и участвахме със съвършено друг дизайн. Въпреки това - да се конструира и да се експериментира с него в час или вкъщи с детето е много добра идея, защото представя едно много различно задвижване.
За построяването му е ползван LEGO Mindstorms EV3 45544 + 45560, макар в инструкциите, които ще намерите по-долу, да са посочени части, които ние не разпознахме и заменихме с аналогични и подобни.
Ние конструирахме робота по инструкциите от видеото тук.
При затруднения да разгадаете видеото, може да си помогнете със снимките от подобната конструкция, но с NXT конструктора - след стъпка 7.

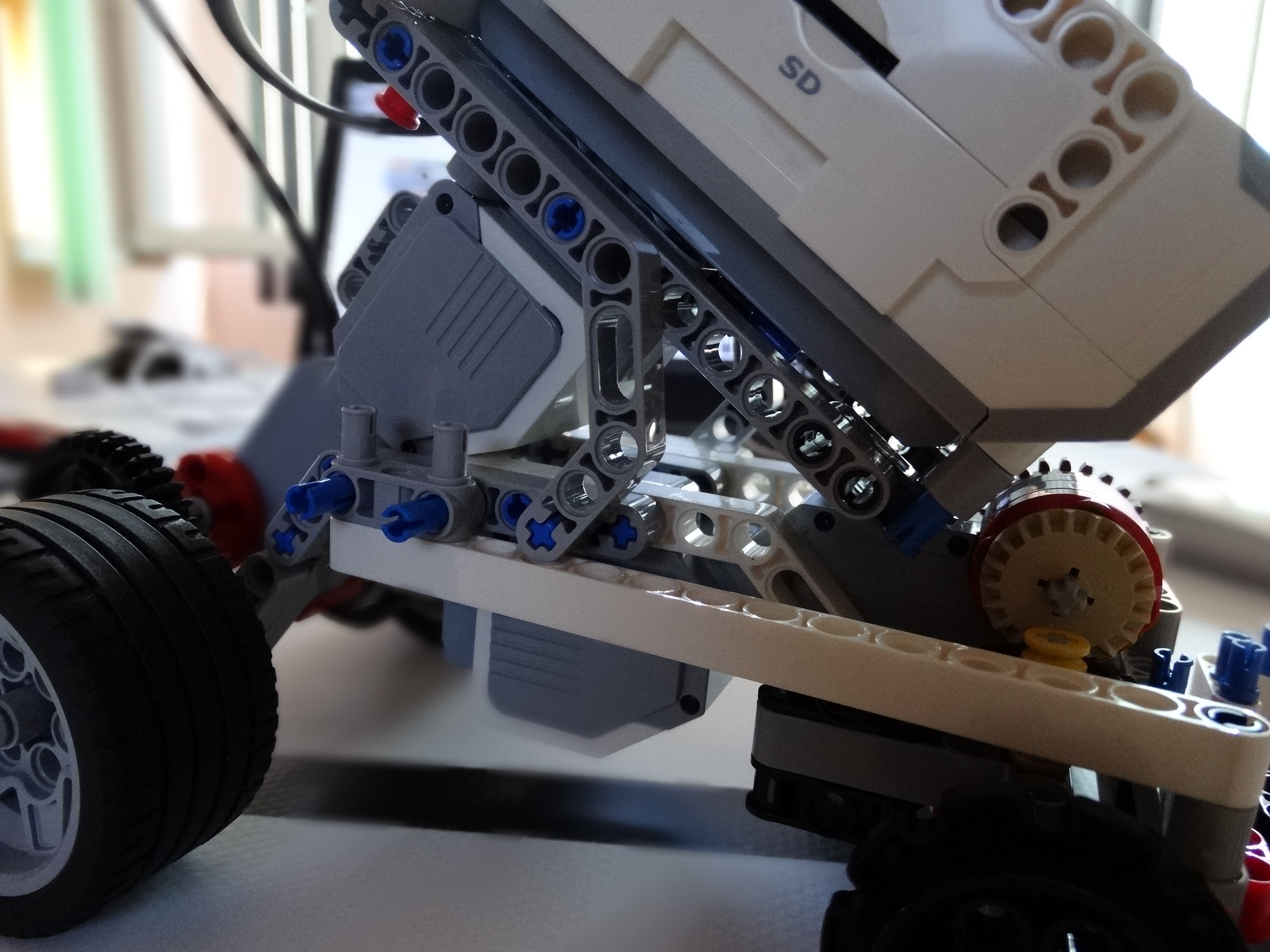
Класическо решение при задвижване на робот с колела е да се ползват двата големи мотора за лява и дясна гума. Този дизайн тук бяга от
класиката. Вместо това ползва задвижване като на автомобил:
- един голям мотор за задвижване на двете
колела с една ос (бутащо цялото тяло) и- един голям мотор за задвижване на посокоопределящите колела.
 |
| По един голям мотор в предната и задната част на робота |
Задните колела са тези, от които идва силовата част - те са бутащите и нямат опция за насочване. А предните колела насочват робота и му позволяват да завива като автомобил.
 |
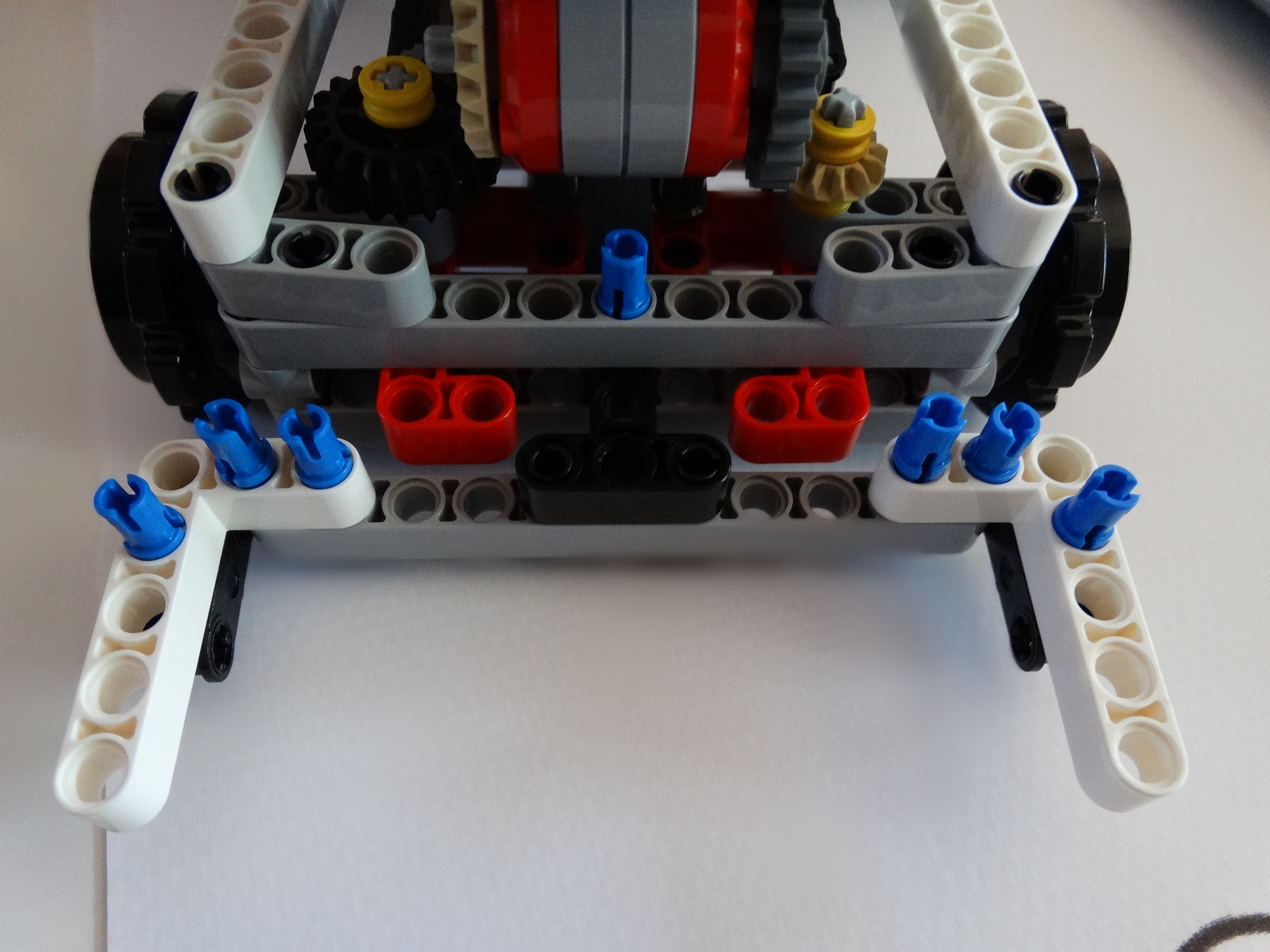
| Предни колела - движение напред |
 |
| Предни колела - движение в завой (има опция да бъде и наляво, и надясно) |
+ Тесен, компактен, красив, но... за целите на състезанието не ни вършеше работа. След изпробването му върху работното поле се оказа, че роботът с така построена ходова част има твърде ниска маневреност.
Недостатъците на робота:
- Подходящ е за игра и направление в широки пространства. Изключително неманеврен и с огромен радиус на завиване за по-ограничено място или работно поле като от състезанието;
- Не успява да се движи в идеално права линия, и посокоопределящите гуми постоянно получават някакво отклонение – било то заради тежестта, която идва изцяло отпред върху тях, или заради празни луфтове между отделните части (които за да се избегнат, е нужда часовникарска точност, която може да бъде постигната, но частите се разместват отново и при най-малките сътресения).
Опитвахме какво ли не, за да подобрим маневреността му и движенението му напред:
- слагахме блокиращи блокове за мисиите, в които бе необходимо само движение по права линия;
- слагахме сензор за цвят, отново с цел следене на права линия;
- слагахме и жиро-сензор, за да пробваме варианти дали някак е възможно да се
контролира отклонението на гумите;
- слагахме и други колела, с различен радиус (по-големи, по-малки) и вид (вместо пластмасови колела - гумени).
 |
| Летва за блокиране на завоите |
 |
| Приставка в предната част за избутване на товар |
 |
| Във височина, роботът може да расте с разнообразни приставки |
В практическата си работа с този робот могат да се разгледат някои теми като:
- маневреност, радиус на завиване;
- задвижване на автомобил и други моторни средства;
- отклонение, триене и съпротивлнение и др.

{kind=link}
Препоръки и идеи от опит: за по-маневрен робот определено ползвайте двата големи монтирани отпред за навигиращи, а средния оставете отзад. Но тогава дали изобщо е нужен среден? (Не!)
В този си вид, роботът ползва и сензор за цвят и следи линия без проблем. Как, може да видите на видеото тук.
Изпробвайте дали бихте могли да монтирате двете носещи колела само с един голям мотор, вместо да ползвате и двата.
Ресурси и инструкции за сглобяване благодарение на:
Josef Nymš и RoboWiki
Тази насочваща статия е идеална за стартиращи занимания по Lego роботика у дома или в училище. Ще се радвам на въпроси или мнения, които може да споделите чрез съобщение в любителската facebook страница. Или ни последвайте за още идеи и материали.
Коментари
Публикуване на коментар